Supervisions: Worked Solutions to 2018 Past Papers
Here are numerical answers, hints, some heavier hints that only appear when the text is highlighted, and selected images and videos of worked solutions to the 2018 past papers in IA NST Maths. Do let me know if you think you've found any errors! (I'd afraid there will probably be one or two.)
Note that where there are video clips, they don't have everything written that you'd write in an answer---I've made use of the fact that I can say things as well to avoid writing everything! You'd need to include more words, and intermediate steps in some cases, in an exam.
To get most benefit from the process,
- Attempt the questions, perhaps first under timed conditions, but then using more time and the lecture notes if needed to produce the best answers that you can.
- If you've got answers to check, or are still stuck after spending a good amount of time, use the numerical solutions or hints, as appropriate.
- Try to fix anything that was wrong or incomplete.
- If you're still stuck, after spending a significant amount of further time, only then resort to any heavier hints or worked solutions.
People often like to read worked solutions as soon as they get stuck. I've relegated the explanation of why this is a mistake to the bottom of this page as it had become a little polemical and unkind. (But it is, for all that, correct.) There is also somewhat friendlier advice on the advice page.
IA NST Mathematics, 2018 Paper 1
1
Answers: (a) x = y(log(10))/(log(2)); (b) 79.
2
Answers: (a) x = -5, -1/2, or 1; (b) (-3 - √5)/2 < x < (-3 + √5)/2.
3
Answers: φ=0 with t=-1, and φ=π/2 with t=0.
4
Answers: (a) 1/9; (b) exp(sin2(x)) + C.
5
Answers: (a) 2π/3; (b) B(3√3)/(4π).
6
Answers: (a) √3; (b) cos-1(1/3).
7
Answers: (a) 1.094; (b) 9/2.
(a) Use the first few terms of a binomial expansion.
8
Answers: x=π/4, y=exp(π/4)/√2.
9
Answers: (a) (-1/2,-1); (b) 3/2.
10
Answers: (a) (1,4); (b) (0,-2).
11Z
Answers: (a) |z|=√2/2, arg(z)=5π/12, |w|=√((log(2))2/4 + 25π2/144), arg(w) = π - tan-1(5π/(6 log(2))); (b) z=iπ(n - 1/4) where n is any integer.
(a) Recall the rules for modulus and argument of a product, to get z. The log is obtained from the modulus / argument form. (b) Write tanh in terms of exponentials. (c) Just use De Moivre's theorem with n=5, and take the real part. This question is rather straightforward. But watch the quadrant of w in (a).
12W
Answers: (a)(ii) (√π/2)(√2 - 1); (a)(iii) √π(√2 - 1); (b)(i) (4π/3)abc; (b)(ii) 0.
(a)(iii) Get the new limits for I from the diagram. They are from y=0 to y=∞ on the outside then from x=y to x=2y on the inside. Now integrate by parts to get I in terms of the integral you need to find. And you already know what I is from (a)(ii). (b)(i) It can be done in Cartesians, but the limits are inconvenient. It's easier to use modified spherical co-ordinates, re-scaling by a, b, and c. (b)(ii) The answer above is hint enough; we're looking for a symmetry property. Specifically that if we split it into two integrals added up, each is odd in one of the Cartesian variables.
Solution to (a); solution to (b).
13Y
Answers: (a) y = log(x)/x + C/x; (b) y = exp(3x)/4 + C exp(-x); (c) 5x2/2 + 4xy - 2y4 = C; (d) log(y) = 2√(x/y) + C.
(a) With a little shuffling this is linear and takes an integrating factor. (b) Likewise. (c) Cross-multiply, take the RHS over to the LHS, then recognize what you've got as an exact differential. (You may not think of this as a technique for solving ODEs, but occasionally it comes in useful.) (d) This takes one of the standard substitutions, u = y/x.
14X
Answers: (a) 4xy = 1; (c) (-√3/2,-√3/2), (-1/2,1/2), (0,0), (1/2,-1/2), (√3/2,√3/2); (d) Respectively minimum, maximum, saddle point, maximum, minimum.
Solution including approximate sketch.
15T
Answers: (b) 1/a0 + (a1/a02)x + (a12/a03 - a2/a02)x2; (c) 1 + (1/6)x4; (d) log(2) + (1/2)x-1 + (3/8)x-2.
(b) It's possible to find the derivatives of 1/f(x) in terms of those of f(x) to get the coefficients in the series for the former. Or alternatively substitute the entire series into a binomial expansion. (c) Treat dividing by the 1/2 power as multiplication by the -1/2 power. (d) Use the laws of logarithms to turn this into something plus log(1 + something small), where the something small consists of negative powers of x.
16Y
Answers: (a) yi = x0 tan(θi); (b) g(θ) = 1/π and G(θ) = θ/π + 1/2 for θ between -π/2 and π/2, with both 0 outside this range except that G(θ) is 1 for θ > π/2; (c) F(y) = 1/2 + tan-1(y/x0)/π; (f) x0 log(3)/π; (g) x0 log(3)/π.
(g) This is a geometric series as (f) gave us a mean proportional to x0.
17Z
Answers: (a) (1/2)log(1 - cot2(x)) + C; (c) En+1 = (2n-1)En/(2n) hence E4 = 5π/32.
(a) Substitute u = tan(x) then use partial fractions. (b) This is just integration by parts. (c) It's probably easier not to use trig. substitutions (until evaluating E1 as π/2) but instead in the integrand for En multiply top and bottom by an extra factor of (1 + x2), then write the integral as two integrals added up, the first of which is En+1 and the second of which can be wrestled into a multiple of En if you remember that the x2 is x times x when setting up integration by parts. This is much harder than (b)!
18R
Answers: (a) 0, 6, 0, 0; (b) -6 with (1,0,-1)/√2, 0 with (1,2,1)/√6, 12 with (1,-1,1)/√3; (c) (1,2,1) [or any nonzero multiple thereof].
(a) Recall how the determinants of the transpose and of the square relate to the original determinant; there's no need to square the whole matrix! (c) Follow the instructions.
19T*
Answers: (a)(ii)(1) No for m=0, yes for m=1 and m=2; (a)(ii)(2) No for m=0 and m=1, yes for m=2; (b)(i) diverges; (b)(ii) converges.
(b)(i) Use the ratio test (or just look at what the term itself does as n goes to ∞). (b)(ii) There are several methods, but perhaps find a way to use a binomial expansion of the square root when n is large (which will require taking out a factor from inside the square root so that you leave behind 1 + a2/n4), then look at the powers of n in the terms you've got. A more elegant (but perhaps harder-to-spot) method is to multiply top and bottom of the term by the factor √(n4 + a2) - n2.
20S*
Answers: (a) tan-1(α)/α.
(a) After differentiating the first result, put in α=√3 to derive the result required. (b) Follow the instructions. The solution for E is in the first instance π log(1 + α) + C but we can find that C is zero by looking at what E does, in the original definition, when α=0. Hence, with α=1, we get the result required.
IA NST Mathematics, 2018 Paper 2
1
Answers: (a) (0,1,2)/√5; (b) 2/√5.
2
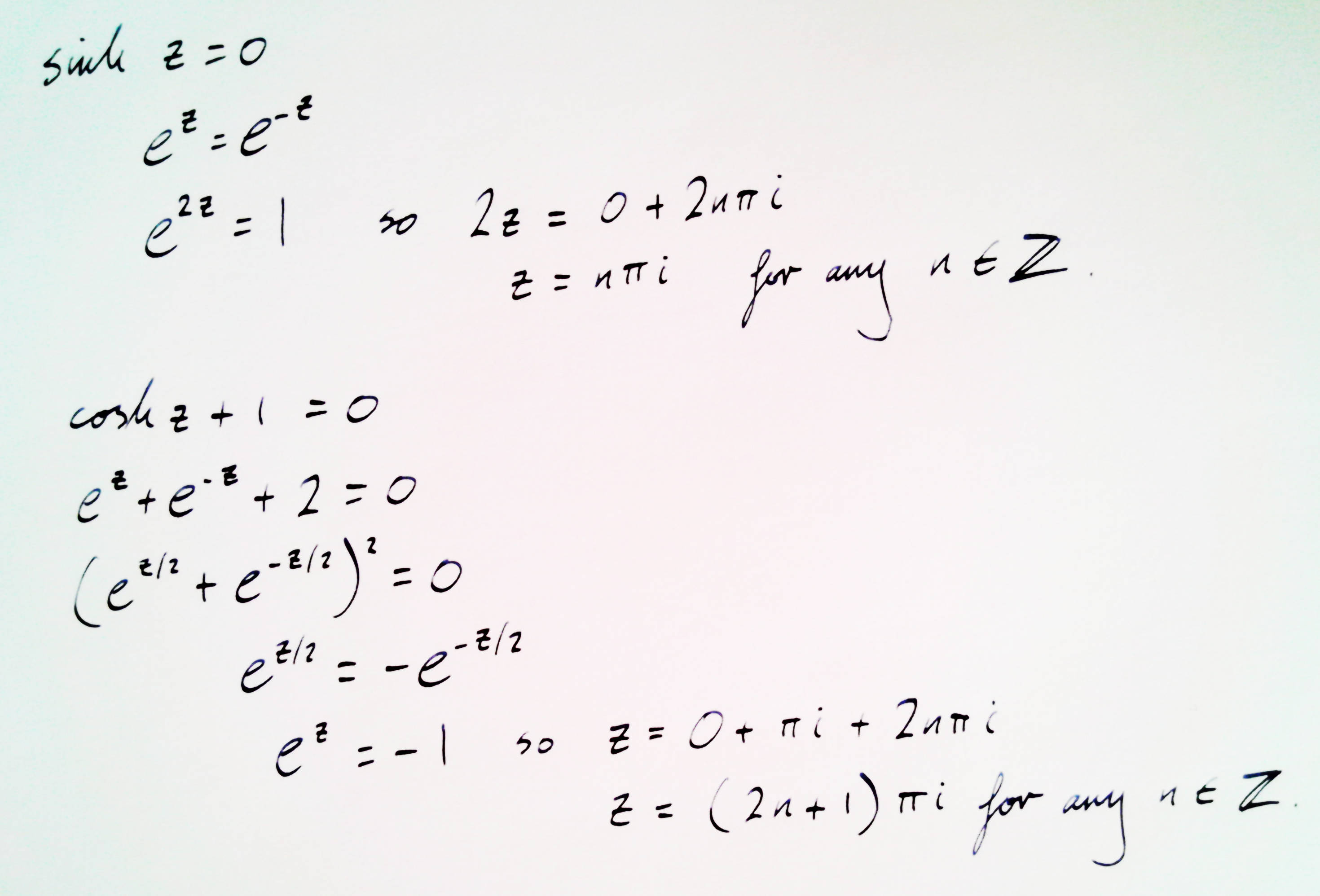
Answers: First nπi then (2m+1)πi where n and m are any integers.
{kind=link}
3
Answer: 2 cosh(φ) and 2 sinh(φ) [or write out the exponentials].
4
Answer: x2 - (3/2)x4.
I'd expand the numerator by substituting x2 into the log(1 + z) series, then multiply by the binomial expansion of (1 + x2)-1.
5
Answer: log(x exp(-t)).
6
Answers: (a) cos(f)(df/dr)(x/r, y/r, z/r); (b) (df/dr)z/r.
7
Answers: (a) y = x exp(-x); (b) y = 3/(3 + x3).
(a) Find an integrating factor, and don't forget to multiply the RHS by it! (b) Take the (xy)2 term to the other side and use separation of variables.
8
Answers: (a) 0; (b) π2.
9
Answers: (-√(3/2),0) and (√(3/2),0).
10
Answers: (a) 1/2; (b) π/2.
To find α we need a quick integral, but the mean is obvious from symmetry so doesn't require integration.
11S
Answers: (b) √15; (c) (b×n̂ + 2b - 3n̂)/5.
(a) The trick is to use the vector triple product identity on the quadruple product, first treating the (a×b) as a single vector, then the (c×d), then equating the two formulae. (b) The first bit is bookwork. Following instructions, we get possible values of µ as -1 and 1; the method could miss µ=0, but that gives a bigger l in any case. (c) First dot the equation with n̂ to discover that x·n̂ is -1. Then cross n̂ with the equation, tidy up with the vector triple product identity, combine with the original equation to eliminate b×n̂, then substitute in the value of x·n̂, and solve.
12X
Answers: (a) sin(φ); (b) cos(φ)/r; (c) fy = gr sin(φ) + gφ cos(φ)/r; (d) fyy = grrs2 + 2grφsc/r - 2gφsc/r2 + grc2/r + gφφc2/r2, hence ∇2f is grr + gr/r + gφφ/r2; (e)(i) f=2xy and ∇f=(2y,2x); (e)(iii) 3√2.
This question is rather long and full of detail. The method in the "hard" step in part (d), of applying a differential operator to itself, is the same as that for one of the question sheet questions, showing that ∇2 in two dimensions is invariant under a rotation of co-ordinates; I'm not going to reproduce it here.
13R
Answers: (a)(i) F gives 2 and G gives 0; (a)(ii) F gives 2π and G gives 0; (a) F isn't conservative, but G is, equalling ∇(x2y2); (b)(i) from (1,0,0) to (0,1,2π/3); (b)(ii) 5/6.
(b)(ii) This is an integral with respect to scalar arclength, which is a little unusual. We get everything in terms of t, and ds in terms of dt by using ds2 = dx2 + dy2 + dz2. (We should find ds is 10 dt.)
14V
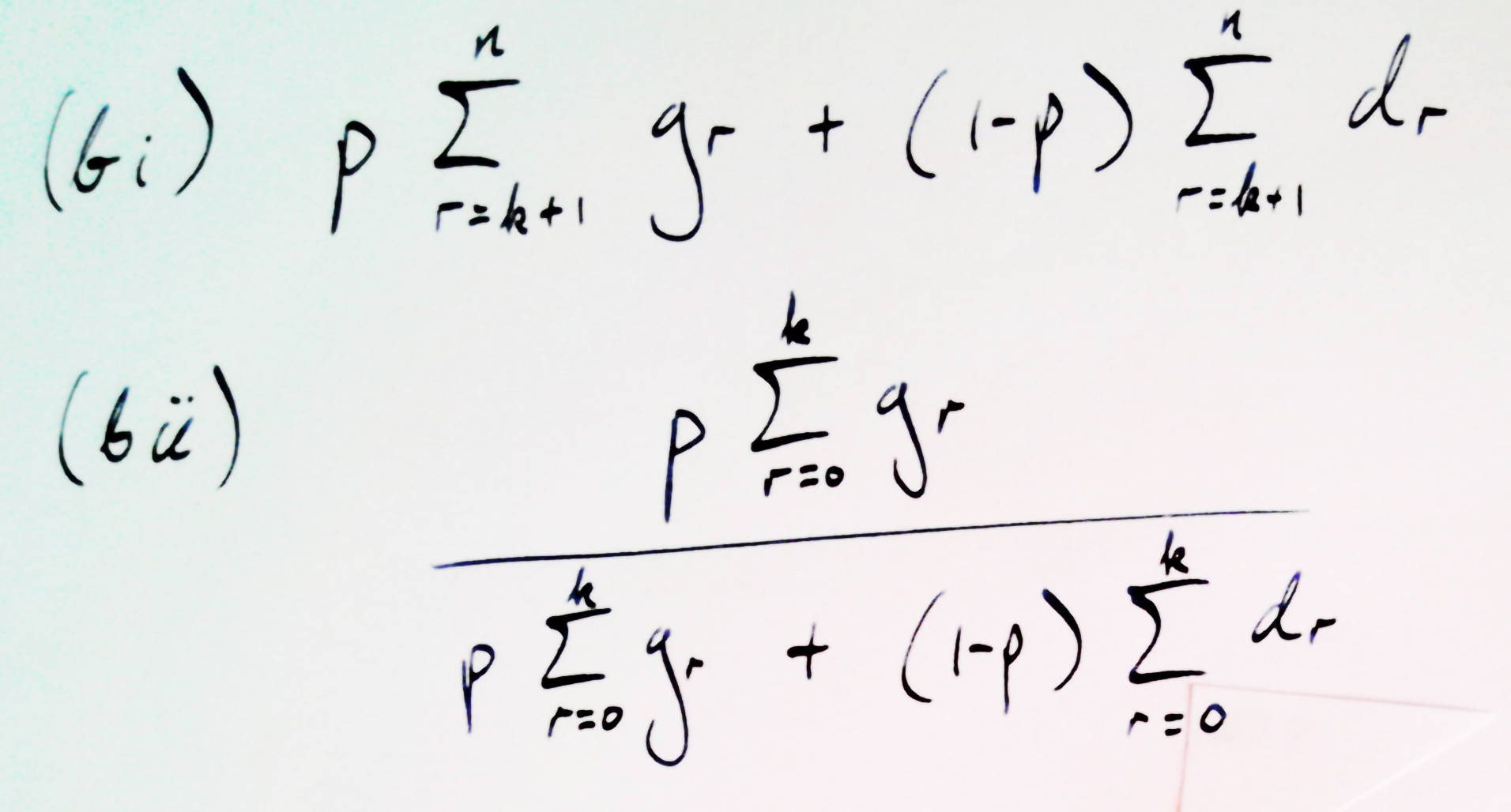
Answers: (a)(i) Ω = {G∩x0, G∩x1, G∩x2, D∩x0, D∩x1, D∩x2}; (a)(ii) pg0; (a)(iii) pg0 + (1-p)d0; (a)(iv) (1-p)d1/(pg1 + (1-p)d1); (a)(v) p(1-g0)/(p(1-g0) + (1-p)(1-d0)); (b)(iii) 1/(1+g0) [or just 1/2 if we allow ourselves to modify g0, the question being not quite clear].
{kind=link}
15Y
Answers: (a)(i) y = (A cos(x) + B sin(x))exp(x) + x2 + 2x + 1; (a)(ii) y = A exp(-x) + B exp(-2x) + x exp(-x); (b) y = kx log x + Cx.
(b) Having obtained the given equation, put v = du/dx. Solving the equation for v results in v=k/x, then integrate to get u, then substitute back.
16W
Answers: (a)(i) 6a·b; (a)(ii) 0; (a)(iii) -2a·b; (a)(iv) a×b; (b)(i) |a×b|2/2; (b)(ii) 2π(a·b)R3.
(a)(i) This follows from the value of ∇·r (,,which is 3). (a)(ii) This follows from the value of ∇×r (which is 0). (a)(iii) Use the vector triple product identity, then work in components for the bit you haven't found before. (a)(iv) See (a)(iii). (b)(i) Note that as the triangle contains the origin, r is within the triangle, so it is orthogonal to the element of vector surface, meaning that the only nonzero contribution comes from the first part of F, which is in the same direction as the element of vector surface in any case. (bii) You may want to consider using a vector calculus theorem here, specifically the divergence theorem, the divergence of F being conveniently constant.
17R
Answers: (c)(ii) -1 and 6; (c)(iii) for µ=-1, any non-zero multiple of (1,1,0), and for µ=6, any non-zero multiple of (18,-3,-7); (d) λ=7 and r is (x, x-1, 2) for any x, a straight line.
(c)(i) Consider whether the three vectors form a basis. (d) Consider whether b is in the plane (and we know it is only a plane) spanned by the three c vectors.
18T
Answers: (b) the a and b turn out to be the Fourier coefficients (given by the usual formulae) for f(t); (c) the a are all zero, and bn is zero for even n and 4/(πn) for odd n, leading to the required form; (d) p=2.
(b) Substitute the K formula into the yf formula, use the cosine subtraction formula on the cos(nθ - nt) that results, and equate coefficients. (c) Remember that you can split the integral into the integral from -π to 0 plus the integral from 0 to π, and this may be useful if the definition of the function changes for positive and negative t, as it does here.
19W*
Answers: (a)(i) one stationary point, (-2/(a2-4), -a/(a2-4), (4-3a2)/(a2-4)2); (a)(ii) maximum if |a| < 2, saddle if |a| > 2, no stationary point if |a|=2.
(a)(ii) Starting from f = axy + x - x2 - y2, obtain the determinant of the Hessian as 4 - a2, with the second-order partial with respect to x always negative, so the condition depends only on a. (b) The Lagrange multiplier method will give you, for each variable nk, the correct exponential factor with the k-dependence, provided that you identify one of your Lagrange multipliers with the β in the question. So far it's like the questions related to the Boltzmann distribution from the question sheet. But then we need to go further, finding the other Lagrange multiplier by using the first constraint (which will need the sum of a geometric series). This is still just four marks! Then applying the other constraint allows us to relate E and β as required. Summing that sum is made easier if you notice that it's equivalent to applying a certain mathematical operation to the previous sum that you did, namely differentiation with respect to β. (This is a hard question. Unless you already know second-year thermodynamics, in which case it's easy.)
20Y*
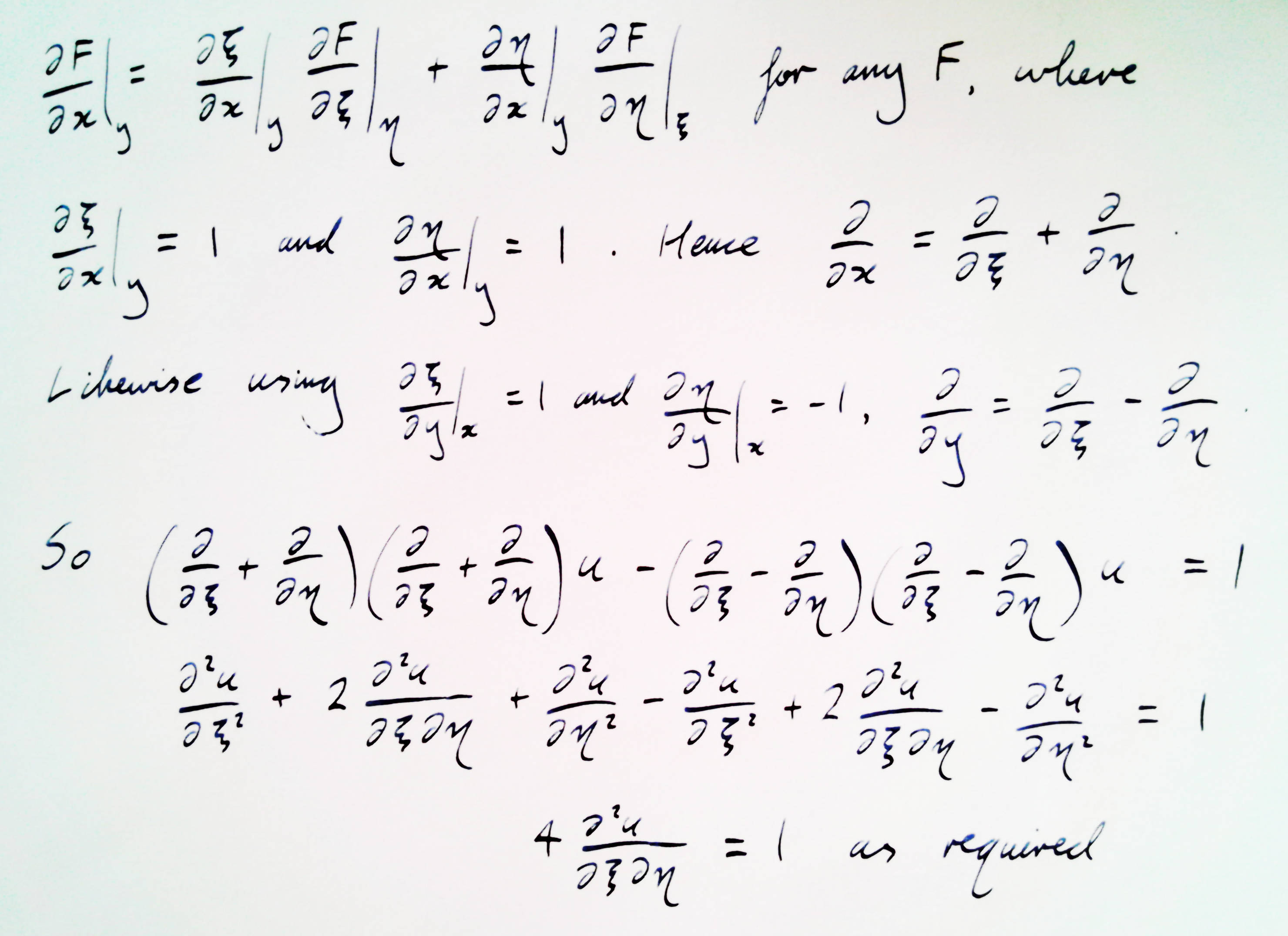
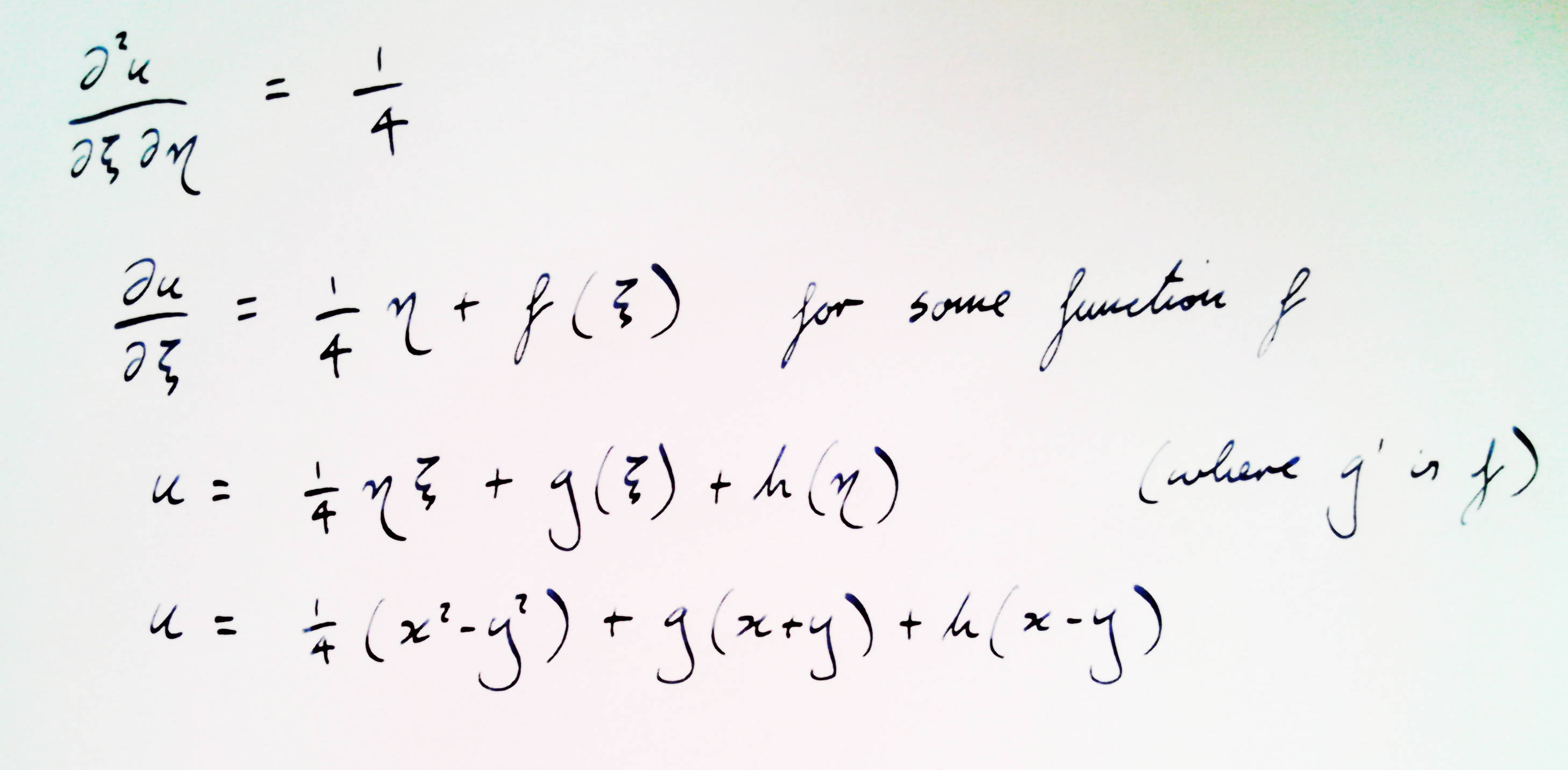
Answers: (a)(i) ηξ/4 + g(ξ) + h(η) where g and h are arbitrary functions; (a)(ii) a=b=d=0 and c=-1/2.
(a)(ii) This is more easily done independently of (i). The boundary conditions must apply for all x, giving a and d from the condition on u and then b from the condition on its derivative. Finally c comes from the equation itself. (b) Find the first derivatives of z with respect to x and y by implicit partial differentiation of the implicit equation. The differentiate again. We should get 2xz/(z2 + x)3 and -2z/(z2 + x)3 for the second x- and y- derivatives respectively, hence the result.
Solution to (ai): page 1, page 2.
{kind=link}
{kind=link}
Reading Worked Solutions Too Early
Many students think that, given limited time, they shouldn't squander too much of it attempting questions that they don't know how to do. They observe that, if they don't work out what to do fairly quickly, they'll have try a lot of things, drawing diagrams and writing equations and following through methods that probably won't work. They risk trying to construct mental models for things that don't yet make sense to them, only to find that they never could make sense. These students think that looking at a worked solution fairly early on will cut out a part of the process as inefficient as it is unpleasant, freeing them to learn useful, valid methods at a greater rate.
These students are wrong.
You can only learn to solve problems by trying to solve problems; you will only learn content securely by trying to apply it to something new; and you won't appreciate what is going on in a worked solution, let alone remember the method subsequently, unless you've explored the problem as best you can first.
Suppose that you had to train for a swimming race. You might well look at advanced swimmers in order to see how it's done. It would be no bad thing to seek feedback from a coach on peculiarities of your stroke. You might even read a book about the technique of swimming. But none of this will help very much unless you are prepared to spend many hours at the tedious and exhausting business of swimming as fast as you can until you can do it that bit faster. Each hour in the pool makes a barely perceptible change to your swimming speed. But if you don't do it you're hardly training for the race at all. And so it is with mathematics. If you don't have the time or patience to try the questions that you don't initially know how to do, before looking at someone else's solution, then you don't have the time or patience needed to get better at mathematics.